


 当前位置:
当前位置:时间:2026-02-05 来源:控制科学与工程学院 编辑: 访问次数:30
在血管介入、消化道内镜以及磁驱动医疗机器人等微创医疗场景中,如何对体内器械进行实时、精准的三维定位,始终是保障手术安全与提升操作效率的关键技术基础。当前临床实践中,CT、MRI 和 DSA 等影像技术仍被广泛采用,其中 DSA 具备良好的实时成像能力,但整体设备体量大、对手术环境依赖较强,且多数情况下只能提供二维投影信息,并伴随着辐射暴露。相比之下,磁定位具有独特的优势,它提供实时的三维跟踪,无电离辐射或复杂的基础设施要求。然而传统磁定位系统通常依赖固定、刚性的外部传感阵列或大型电磁装置,其部署灵活性和有效工作空间受到限制,难以适应复杂多变的临床操作环境。
2月4日,浙江大学控制学院陆豪健研究员团队联合中国科学院深圳先进技术研究院徐天添研究员团队在知名学术期刊《Nature》(《自然》)旗下专注于传感器研究领域的子刊《Nature Sensors》(《自然·传感器》)上发表题为“A Portable and Flexible Intermediary Patch for in vivo Magnetic Localization”的研究论文。论文创新性地提出了一种灵活的柔性磁传感器阵列和双级定位范式,实现术中体内医疗设备的高精度实时全局三维定位。浙江大学控制学院博士生向平宇,硕士孙丹颖,中国科学院深圳先进技术研究院博士生马国耀为共同第一作者,陆豪健研究员和徐天添研究员为共同通讯作者,其他合作者包括浙江大学控制学院博士生张宏业,熊蓉教授和王越教授。
图1 论文上线截图
从“固定参考”到“随形部署”的磁定位范式转变
本文的核心贡献点在于提出不再依赖固定位置的刚性传感阵列的磁定位框架,能将按医疗场景定制的柔性传感器贴片布置在尽可能靠近目标的位置,从而实现多种介入医疗场景中的高精度三维在体定位,为磁定位技术在临床中的应用提供了一种更加灵活的解决方案。
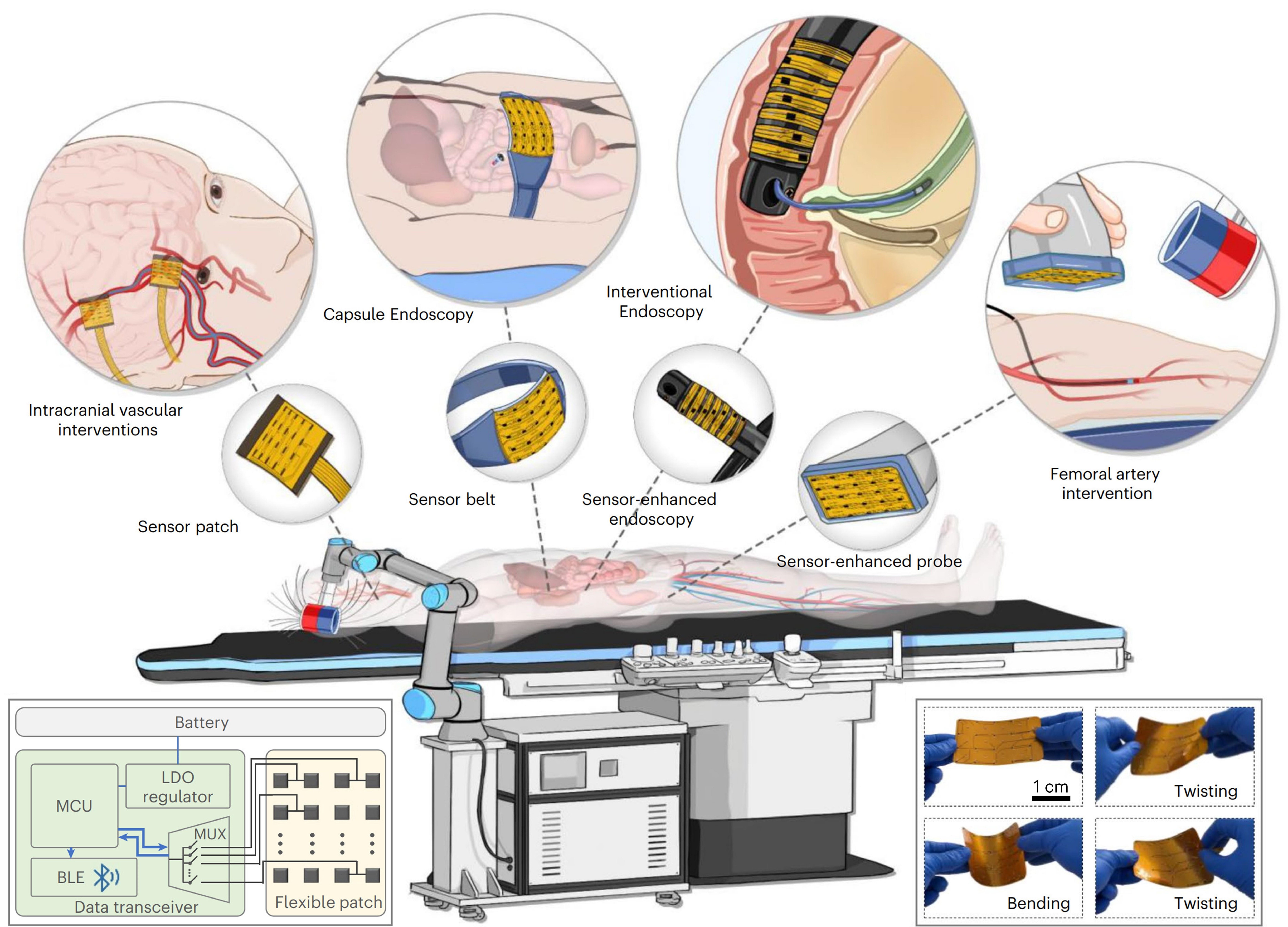
图 2 柔性贴片在不同医疗场景中的示意图
一贴一算,打开双阶段磁定位新方式
在工程实现方面,不同于大部分磁定位研究,该中间贴片基于柔性印刷电路板构建,整体结构轻薄、柔顺,可根据具体应用需求设计为不同形状与尺寸,如贴附于体表,或集成于探头、内镜等医疗器械表面,实现“即贴即用”的部署模式。
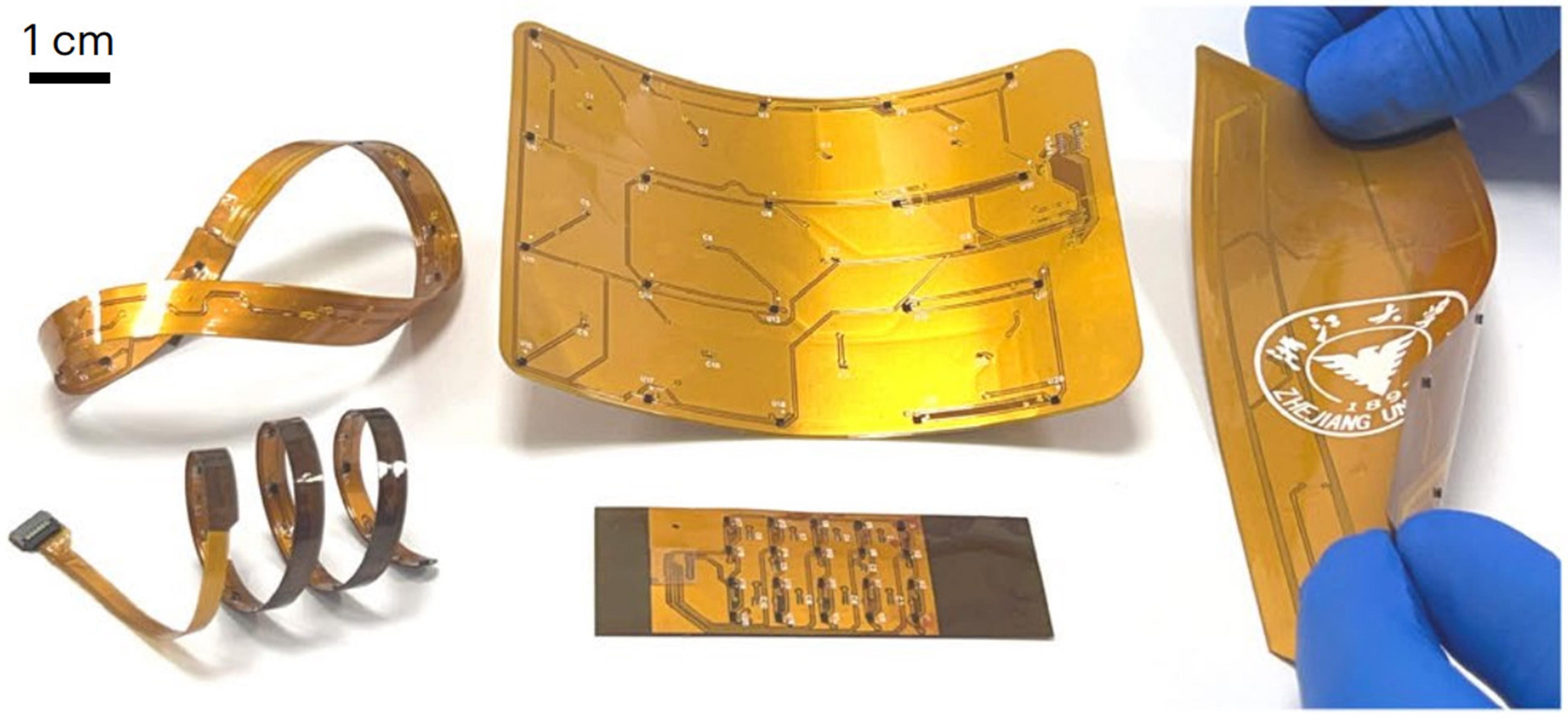
图3 不同构型的柔性贴片
基于此柔性贴片,提出双阶段定位算法,该框架类似于A-GPS(辅助全球定位系统)中的“基站辅助定位”机制:先由外部磁源确定中间贴片在全局坐标系中的位置,再以该贴片作为局部参考,实现对体内小型磁性目标的定位。
图4 由外部磁源定位中间贴片
柔性阵列和双阶段磁定位框架的引入,为磁定位向小型化、可部署化提供了现实路径。该定位系统能够更自然地嵌入各种现有医疗器械体系中,从而降低临床场景中定位设备的硬件门槛。
体外模型验证:“贴”近目标,而非“框”住操作
在手术部位多样、器械介入路径复杂或对部署灵活性要求较高的临床应用中,固定感知范围与部署位置仍面临一定的隐性限制,在许多情况下需要在定位精度与有效工作空间之间权衡。在此背景下,本文所提出的方法引入柔性磁传感贴片作为中间单元,对传统磁定位系统的部署方式进行了拓展,在不改变原有磁定位基本原理的前提下,有效提升了系统对目标的针对性和对复杂临床场景的适应能力。脑动脉血管介入和ERCP导丝置入的模型实验验证了该方法的灵活性和面向临床特定部位精确定位的优良性能。
图5 体外模型定位验证
多场景体内全链条测试
在真实生物环境中对完整流程进行系统验证,是这项技术走向应用的关键一步。研究团队将系统带入多种典型体内场景开展测试:在巴马猪体内模拟了ERCP 介入过程,在巴马猪股动脉内进行了导丝定位实验,并对新西兰兔进行长时间柔性佩戴实验,通过连续采集的信号,分析胃肠蠕动速度等生理指标变化。跨器官、跨模型、跨应用场景的连续实验,展示了该技术从临床介入引导到手术室之外生理监测的完整应用链条。
图6 动物体内实验验证
研究团队希望证明,磁定位不仅可以在受控环境中“测得准”,也能够在真实体内环境中“用得上”。从 ERCP 介入到血管导丝定位,再到长期生理信号监测的连续验证,展示了这一技术在多类微创医疗场景中的应用延展性。
原文链接:https://www.nature.com/articles/s44460-025-00017-9
该研究获得了国家重点研发计划,国家自然科学基金,深圳市科技项目,工业控制技术全国重点实验室项目,中国科学院青年创新促进会,小米基金等多方面的资助与支持。