


 当前位置:
当前位置:时间:2025-06-19 来源:控制科学与工程学院 编辑: 访问次数:776
动机和灵感
自然界的生物能在复杂环境中凭直觉规划路径并平稳抵达目标,而这一能力对机器人却是巨大挑战。现代导航算法在常规场景中表现尚可,但面对混沌复杂环境,机器人常陷入卡顿、走偏甚至瘫痪的窘境,暴露出路径感知与运动生成间的断层。相较于人脑直觉化提取特征、快速勾勒路径,传统机器人依赖环境采样和搜索算法,计算需求随环境复杂度激增,尤其对非完整动力学约束的机器人(如无法横向移动的汽车)而言,挑战更为严峻。
为此,我们开发了针对非完整运动机器人的分层规划系统,从根本改变了机器人的思考方式:前端摒弃繁重搜索,采用神经网络直接从环境图生成路径,如同人类一眼规划路线。这赋予机器人时间稳定性——无论环境多复杂,都能在可预测时间内完成规划,不再想半天才迈一步。然而,仅有路径还不够,机器人还需要具体知道在什么时候如何动。后端优化的作用在于将前端生成的粗略路径转化为机器人可以精确执行的时空最优轨迹指令。为此我们为非完整约束系统引入微分平坦转换与伪弧映射技术,并重构模型以消除奇异点——就像将易折皱的纸换成柔韧橡皮布,让机器人在复杂机动场景下也能生成平滑、安全的轨迹。
当传统导航算法还在能否找到路径与能否稳定执行间挣扎时,我们的分层系统已实现如人般的稳定导航,迈向更高的物理智能。这种结合时间与数值双重稳定性的创新,为非完整运动机器人在复杂环境中的自主移动开辟了全新可能。未来,从城市交通到野外探索,机器人将以更智能、更流畅的姿态,融入人类生活。
这项成果于北京时间6月19日刊登在机器人领域权威期刊《科学·机器人》(Science Robotics)。论文第一作者为浙江大学控制科学与工程学院博士研究生韩志超,通讯作者为我院长聘副教授高飞。
实验结果
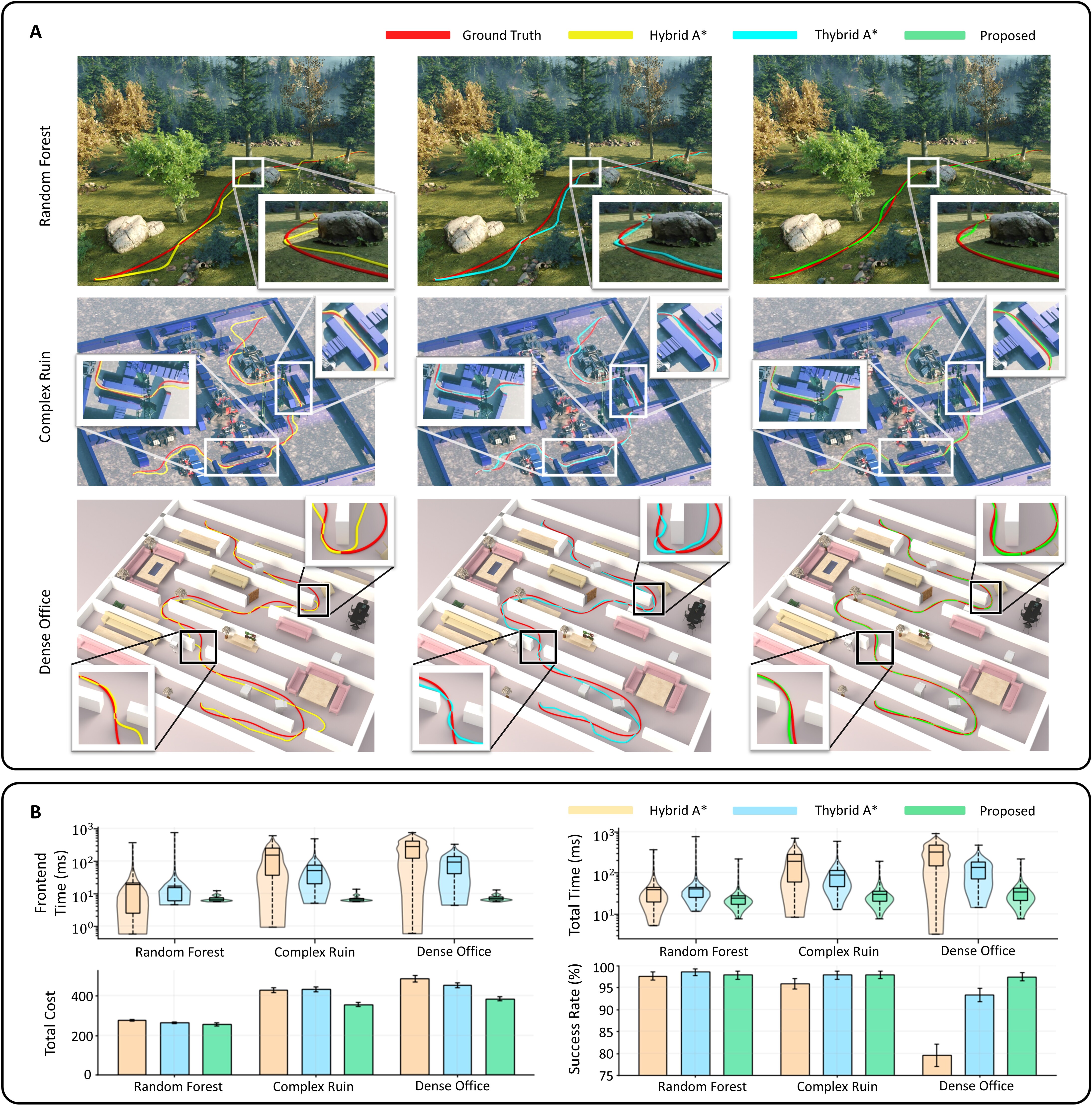
任意复杂环境下展现出的时间稳定性
我们在各种场景下进行数千次实验,并与传统方法展开定量对比。随着环境复杂性的提升,传统算法的规划时间迅速攀升,相比之下,无论何种场景我们的前端规划都能在稳定时间内输出可行路径。不仅如此,除了效率以外,我们最终获得的轨迹也更加平滑,质量更高。这种跨环境的稳定计算为极限场景应用提供了关键保障:无论环境多复杂,机器人都能在可预期时间内完成规划,保持反应的灵敏度。
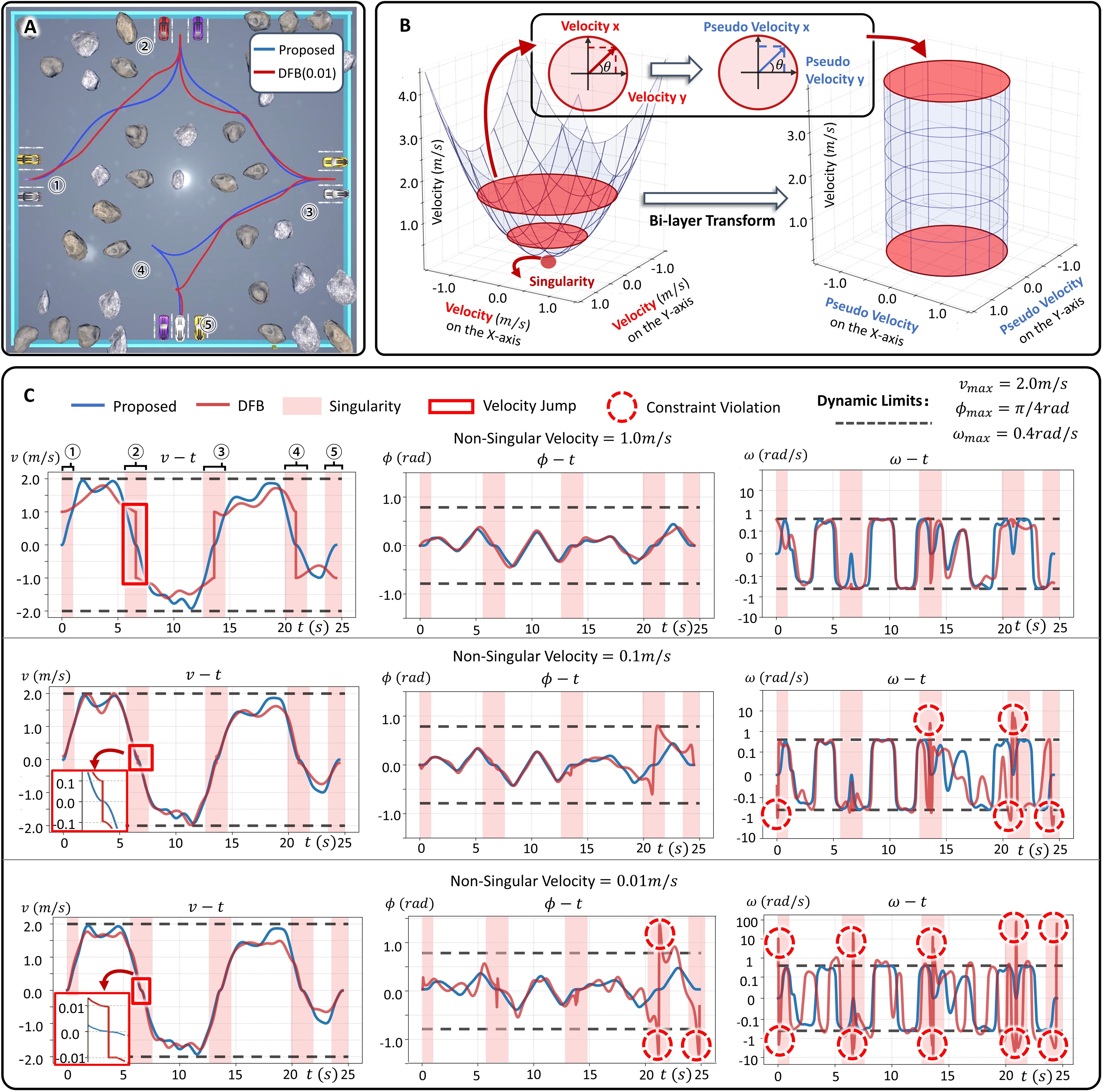
复杂机动场景下轨迹的稳定数值收敛性
虽然前端能迅速生成粗略路径,但后端轨迹优化对提升路径质量至关重要。传统微分平坦技术虽能简化计算,却难以避免奇异点带来的数值不稳定性——当车辆停止或转向时,速度接近零会导致计算崩溃,使机器人剧烈抖动甚至无法完成任务。我们通过引入中间变量平滑重映射平坦模型并设计专用轨迹表示,从根本上解决了这一问题,确保在复杂环境中稳定生成满足动力学约束的时空最优轨迹。结果显示,与带有奇异点的基准方法相比,我们的系统减少了38.2%的最大位置跟踪误差和57.7%的最大角度跟踪误差,大幅提升了导航系统可靠性。
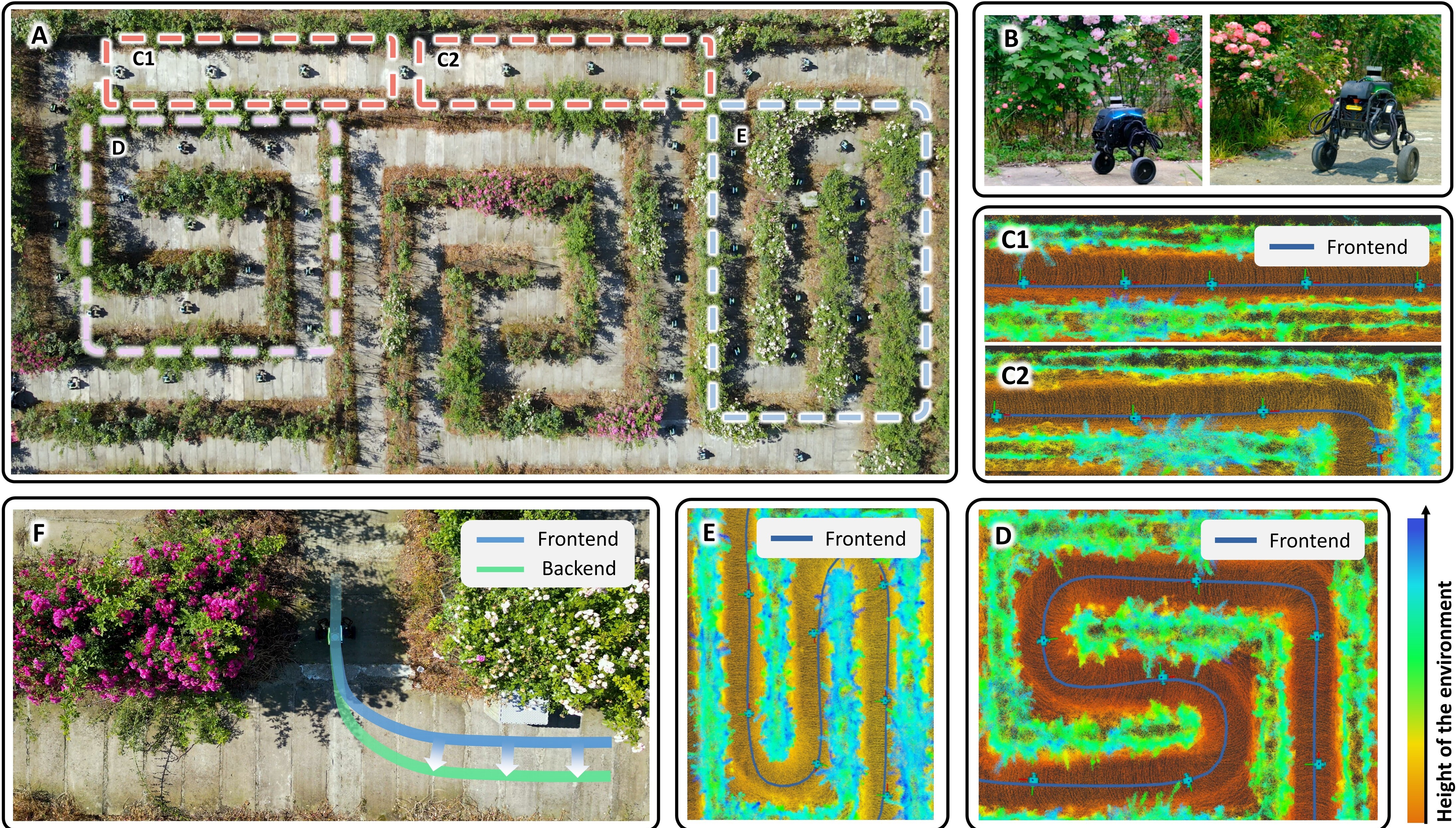
大尺度迷宫环境下的全局导航验证
我们在大尺度复杂迷宫中完成了实物测试,让轮腿机器人仅依靠机载芯片和激光雷达,成功完成了数百米的全自主导航。机器人从起点出发,轻松穿越横向弯道、长直道和纵向弯道,全程表现稳定流畅。系统前端基于离线数据进行训练,之后无缝迁移至实物环境。不仅如此,归功于算法的高效性,即使面对地图偏差或突发障碍,系统依然能在运动中实时紧急规避,展现出卓越的环境适应能力。
应用拓展
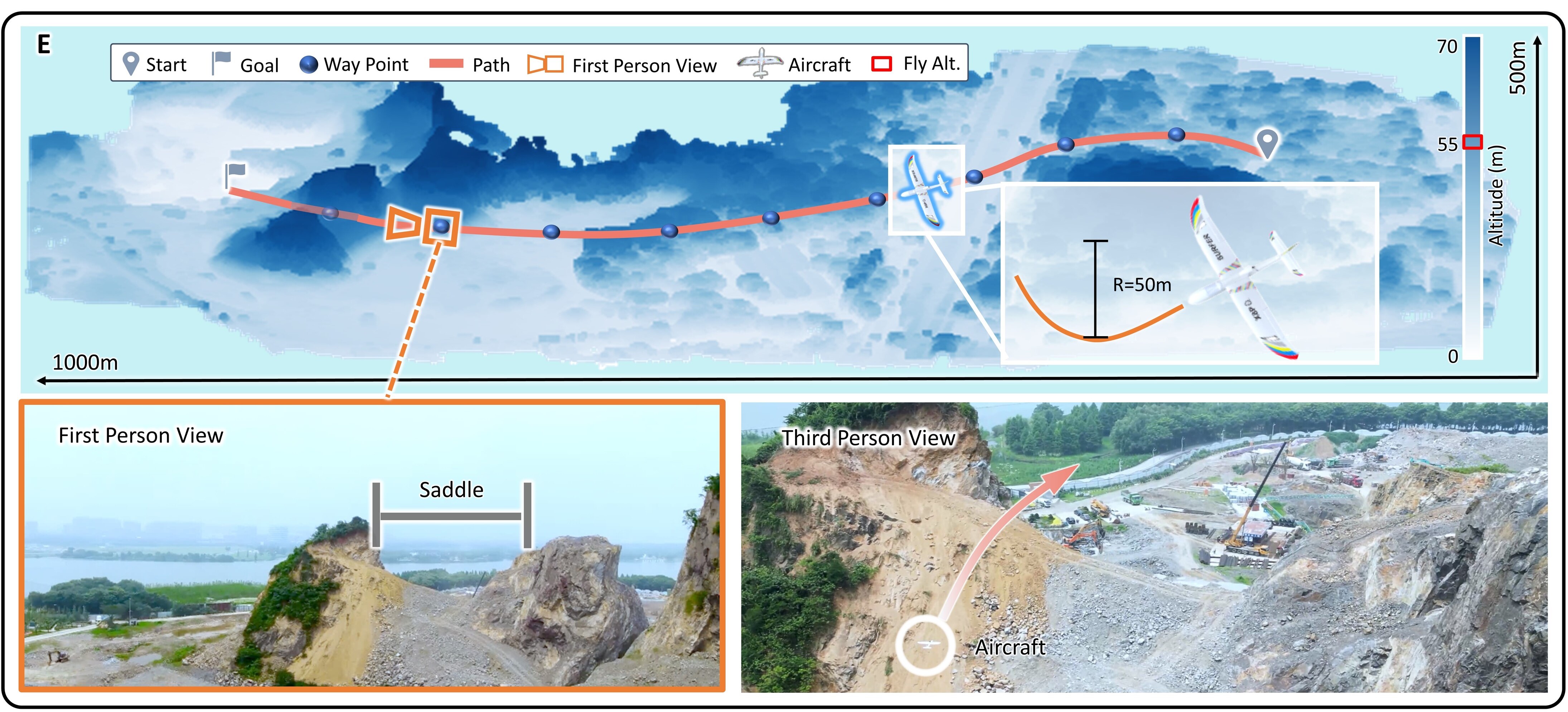
固定翼导航扩展
我们成功将规划系统扩展至固定翼导航,直接利用地形高程图进行规划。在山地丘陵导航中,算法仅需不到10毫秒就能生成接近最优解。并通过实物飞行实验证明,系统能智能引导固定翼穿越山峰间的鞍部点,平衡路径距离与地形安全裕度。特别值得一提的是,所有实际飞行训练完全基于仿真数据,充分展示了算法的适应性和在固定翼等平台上的应用潜力。
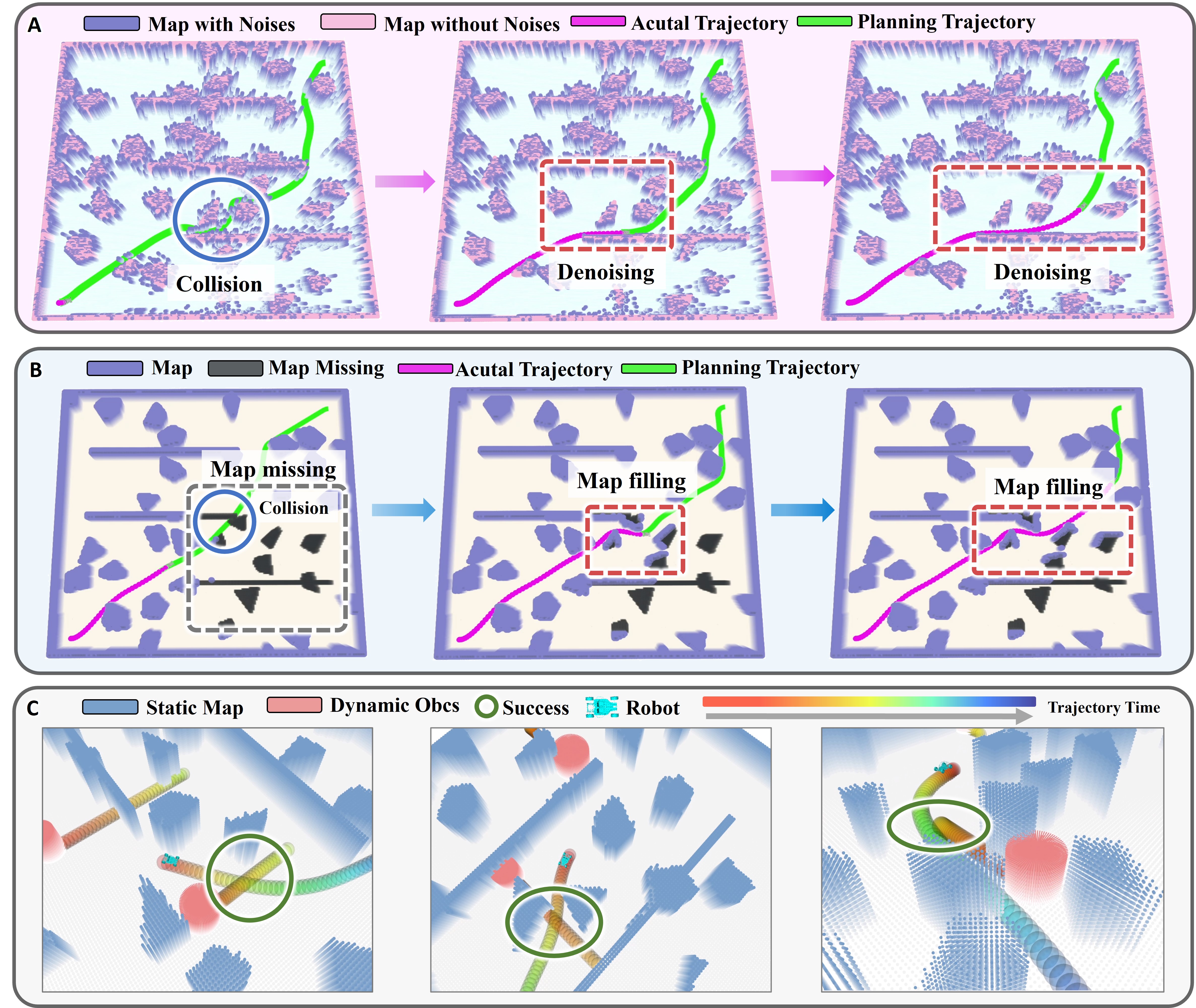
不确定性场景下的鲁棒适应性
为全面评估系统在不确定环境下的表现,我们设计了包含高密度障碍物和复杂墙体的严苛测试场景。测试覆盖了实际应用中最具挑战性的三种不确定情况:噪声地图、不完整地图和动态障碍物环境。面对噪声地图,系统依靠泛化能力识别正确的导航拓扑;在不完整地图中,实时感知与快速重规划确保了安全导航;对于动态障碍物,系统能生成与移动物体时空域不重叠的安全轨迹。即使在这种极端条件下,系统仍保持令人印象深刻的导航成功率。这充分证明了我们方法在面对复杂不确定环境时的鲁棒性和适应能力——真正做到了看得见,绕得过,避得开。
结果讨论和未来工作
我们提出的层级式规划系统通过融合神经网络和数值优化,成功实现了机器人在复杂环境中的高效稳定导航,为自主移动机器人开辟了新的发展路径。这项研究的意义在于,它显著提升了机器人在未知复杂环境中的适应能力和导航成功率。稳定的时间规划使机器人行为更加可预测,这对人机共存环境至关重要——人们能够更容易理解和预判机器人的运动意图,从而建立信任感。同时,可预测的运动轨迹也便于系统监控和安全保障,使得机器人能够更好地融入各类应用场景,无论是工业环境还是公共空间。在具体使用上,我们规划器接口上仅仅需要一个目标导向,从而可作为任务系统的基础模块无缝整合到各种高层应用中,例如自主探索、精确跟踪和复杂搜救。
当前系统面临仿真到现实的部署挑战。真实世界环境复杂多变,传感器噪声和环境遮挡可能影响规划效果,同时现实中的特殊情况可能超出仿真训练范围。未来,我们计划开发更高保真度的场景模拟器,缩小仿真与现实的差距。随着人工智能技术和硬件的进步,我们期待这些改进能够解决现有挑战,最终实现真正的人类级导航智能,让机器人在各种环境中安全、可靠、可预测地工作。